


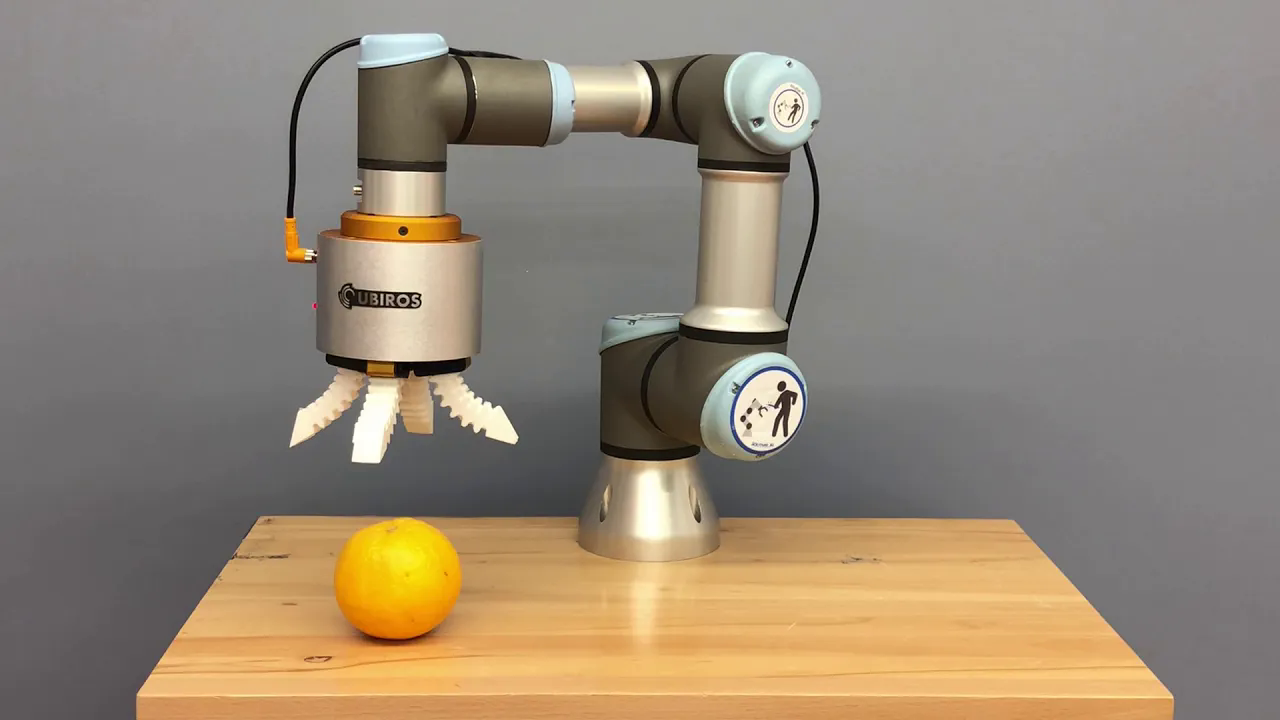








The Gentle Pro is a soft robotic end-of-arm tool with four independently adaptive fingers, offering full-surface contact for secure handling of delicate, irregular, or variable-sized items. Fully electric and air-free, it simplifies integration for industries like food, cosmetics, and lab automation.
Designed to conform around challenging shapes, the Gentle Pro provides balanced grip distribution and reliable performance in fast-paced, high-mix environments. Its compact build and easy mounting make it a go-to solution for robotic systems requiring flexible, damage-free grasping.
Real-time feedback system ensures secure gripping before movement or transfer.
Seamless integration with Universal Robots, KUKA, Yaskawa, and more.
Boosts production throughput with quick, repeatable gripping for high-volume applications.
Soft, safe design enables fault-tolerant gripping and interaction alongside human workers.
Gripper Dimensions
(diameter, height)
Input Voltage